An Optimization-Based Theory of Mind for Human-Robot Interaction
Generating robot action for interaction with people is not scalable without learning, but learning from scratch has too high sample complexity. Inductive bias becomes critical, but what is the right inductive bias when it comes to people? We study the assumption that people are driven by intentions and are approximately rational in pursuing them. We derive algorithms that can leverage this assumption, ways in which to bring it closer to matching real human behavior, as well as ways in which robots can remain flexible to human behavior that violates it.
Speaker Details
I am an Assistant Professor in the EECS Department at UC Berkeley. My goal is to enable robots to work with, around, and in support of people. I run the InterACT Lab, where we focus on algorithms for human-robot interaction — algorithms that move beyond the robot’s function in isolation, and generate robot behavior that also accounts for interaction and coordination with end-users. We work across different applications, from assistive robots, to manufacturing, to autonomous cars, and draw from optimal control, planning, estimation, learning, and cognitive science. I also helped found and serve on the steering committee for the Berkeley AI Research (BAIR) Lab, and am a co-PI of the Center for Human-Compatible AI. I’ve been honored by the Sloan Fellowship, MIT TR35, the Okawa award, and an NSF CAREER award.
- Date:
- Speakers:
- Anca Dragan
- Affiliation:
- UC Berkeley
Series: MSR AI Distinguished Lectures and Fireside Chats
-
-

Frontiers in Machine Learning: Fireside Chat
Speakers:- Christopher Bishop,
- Peter Lee,
- Sandy Blyth
-

Learning over sets, subgraphs, and streams: How to accurately incorporate graph context
Speakers:- Debadeepta Dey,
- Paul Bennett,
- Sean Andrist
-
-
-
-

Fireside Chat with Anca Dragan
Speakers:- Anca Dragan and Eric Horvitz
-

Conversations Based on Search Engine Result Pages
Speakers:- Maarten de Rijke
-
-

The Ethical Algorithm
Speakers:- Michael Kearns
-

Fireside Chat with Stefanie Jegelka
Speakers:- Alekh Agarwal
-

Fireside Chat with Peter Stone
Speakers: -

Efficient Robot Skill Learning: Grounded Simulation Learning and Imitation Learning from Observation
Speakers:- Debadeepta Dey
-
-
Building Neural Network Models That Can Reason
Speakers:- Christopher Manning
-

Fireside Chat with David Blei
Speakers: -
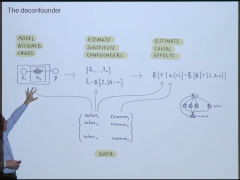
The Blessings of Multiple Causes
Speakers:- David Blei
-

As We May Program
Speakers:- Peter Norvig
-

Fireside Chat with Peter Norvig
Speakers:- Eric Horvitz,
- Peter Norvig
-

An Optimization-Based Theory of Mind for Human-Robot Interaction
Speakers:- Anca Dragan
-
Fireside Chat with Manuel Blum
Speakers: -
-

Fireside Chat with Dario Amodei
Speakers: -
-